Embodied Autonomous Systems
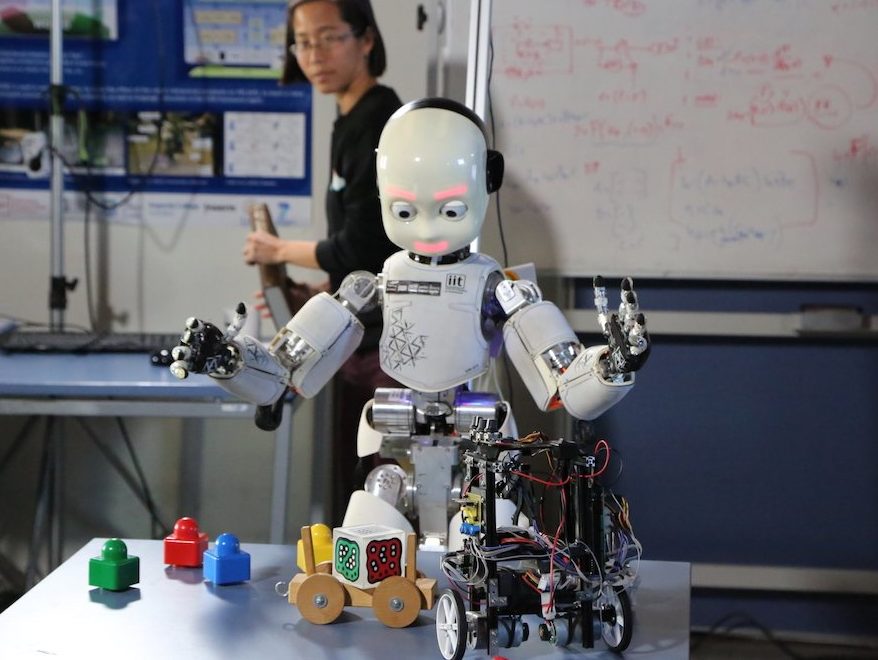
SPECS has a long track record in embodied models of cognition. We have focused on the 2014-2018 period both on the emulation of rodent navigation behavior and human social behavior. These models have served a number of basic and applied EC projects (e.g., HR-Recycler, socSMCs, WYSIWYD, EASEL, cDAC). The most notable outcomes are an integrated architecture for the real-time control of social behaviors which has been validated a broad range if Human-Robot Interaction (HRI) studies (e.g. Lallee et al, 2015), the DACX model of rodent navigation and spatial cognition (Maffei et al 2015) and a control architecture for a robot tutoring system (Vouloutsi et al, 2016). These models have also provided the foundation for the development and deployment of a STEM training module for school students.
for references see https://specs-lab.com/publications/


The Robotic Systems Laboratory is a multidisciplinary environment that supports research in the following areas of interest:
- Classical conditioning, operant conditioning and learning models based on the Distributed Adaptive Control framework, which has become a standard in the field of artificial intelligence and behavior-based robotics
- Embodied models of cognition.
- Multi-robot exploration and coordination
- Navigation in human and animal behavior
- Implementation in robots of brain models of the hippocampus, cerebellum, thalamus/cortex
- Rule learning VR robots/avatars
- Fast and reliable insect-based visual navigation models for flying vehicles
- Investigation of the neuronal substrates of chemical sensing and their application to odor discrimination and localization.
see the Robotics facility to learn about the different robots available in SPECS